工业电机驱动如何提高能效?
电机在未来仍将广泛使用。从小型家电到工业制造,再到重型机械,电机功能丰富,几乎无所不在。电机约占全球电力消耗的一半,而且这一比例还在不断增长。如今,全球减排力度不断加大,提升电机能效显得愈发关键。为此就需要开发先进的控制算法,采用新型高效电机结构,并引入现代半导体技术。本文主要介绍系统用途、市场趋势、系统描述等。
系统用途
• 工业电机驱动器是当今全球工业的支柱,
其能耗约占所有工业应用能耗的近三分之二。
• 相关法规越来越严格,市场对大幅降低工业电机驱动器能耗的需求变得愈加迫切。交流电机通常可直接由交流电源驱动。然而,为了提高能效和加强控制,通常需要采用变频驱动。
• 相较于传统的节流控制, 采用变频驱动 (VFD) 的工业驱动系统能效更高。
安森美 (onsemi)提供各种各样的 VFD 产品,包括 MOSFET、 IGBT、 二极管、 功率集成模块 (PIM) 和智能功率模块 (IPM)。
• 子系统中使用的其他器件和技术包括:栅极驱动器、运算放大器、 位置传感器、 温度传感器, 以及其他用于控制和感知的器件。
• 借助现代半导体和新型电机架构,电机驱动器的能效和寿命可得到提升。
• 工业驱动器应用于众多工业领域,包括过程自动化、 风扇控制、 液体和气体泵、 机器人、 物料搬运、 机床、 石油和天然气工业等。
市场趋势
二氧化碳减排潜能
电机用途广泛, 从小家电到重型设备都有应用。多个信息来源表明,全球大约一半的电力被电机驱动器消耗。工业应用消耗的电力占到世界总发电量的近三分之一。工业领域自动化程度加速提高,工业电机系统的数量预计仍将持续增加。如今,可持续发展和能效逐渐成为热门话题。因此,更新现有方案和新部署的系统以尽可能提高能效至关重要。
预计 2024 年至 2029 年, 工业电机驱动器市场将以 5% 至 5.5% 的平均复合增长率 (CAGR) 增长,市场规模将从 255 亿美元扩大到 327 亿美元。发展中经济体的快速工业化是推动此增长的一大关键动力。目前, 市场对优化流程和提升能效的需求日益迫切。与燃气涡轮机等其他方案相比,电力驱动器往往能效更高,维护需求更少。
《2020 年电机系统市场评估》 (MSMA) 报告显示,美国的电机驱动系统蕴藏着巨大的节能减排潜力,每年可节省超过50 亿美元成本,并减少 4300 多万吨的二氧化碳排放。控制器和电机是需要改进的重点。
变频驱动有助于改善电机控制器, 显著提高电机在变化负载下的能效。以往, 许多系统的额定功率过大。这种做法虽然延长了系统的使用寿命,但同时也降低了系统的整体能效。通过实现负载匹配和变频驱动,系统的能效可以提升 10% 以上。
前述的 2020 年 MSMA 报告指出,采用更高能效的电机,例如永磁同步电机, 可以让美国每年节省 45,000 GWh 的电力。宽禁带 (WBG) 半导体虽然初始投资更高,但可进一步提高系统的能效。此类半导体的其他优势包括工作温度更高、工作电压更高和开关频率更高,有助于减小无源器件的尺寸并降低成本。
变频驱动
现代三相电机大多由功率开关驱动, 广泛应用于机器人、工业和其他要求苛刻的领域。这些系统通常使用脉冲宽度调制 (PWM) 信号来确定导通和关断状态之间的转换。这种方式被称为变频驱动 (VFD),能效比传统的节流控制更高,更能在负载变化的情况下有效地节约能源。
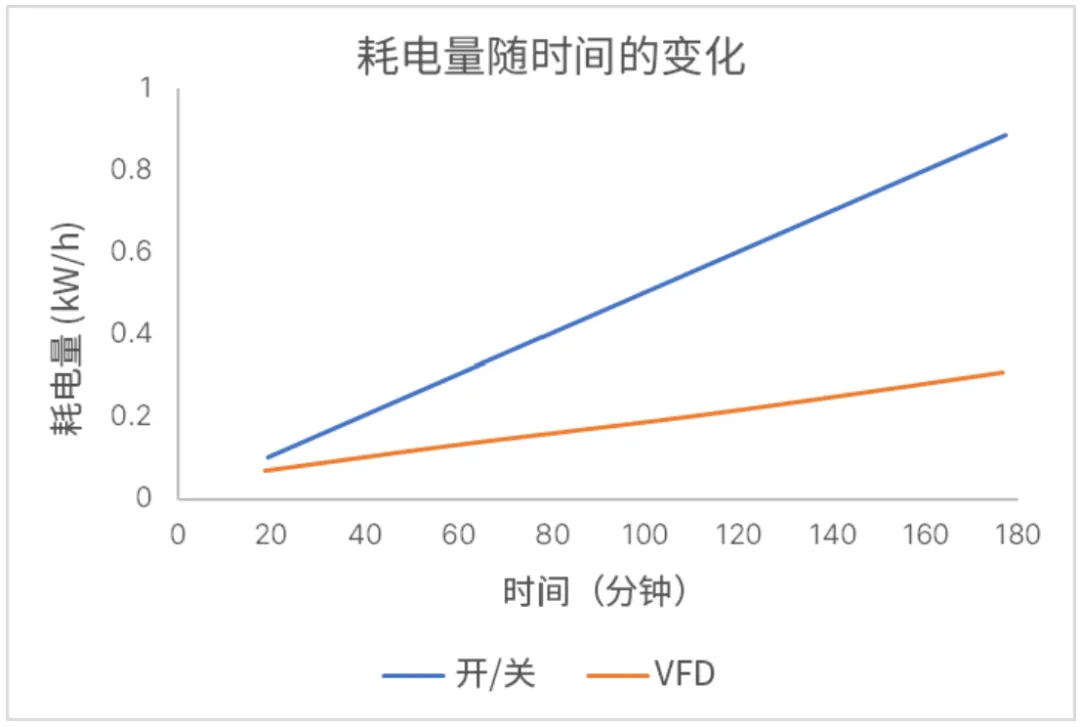
图 1:变频驱动对电力消耗的影响
系统描述
电机类型
以前广泛使用的直流电机采用机械电刷在定子和转子之间换向,这种设计导致噪声高、 维护需求大、 能效低且散热性能差。相比之下,无刷电机采用电子换向, 因此能效更高、 更安静, 几乎不需要维护,使用寿命更长。然而, 无刷电机的控制更加复杂。交流电机主要有三种类型:交流感应电机 (ACIM)、 永磁同步电机 (PMSM) 和无刷直流 (BLDC) 电机。
交流感应电机由定子和转子两部分组成, 定子具有多个绕组,而转子由多个导电条构成。根据法拉第定律, 当交流电流通过定子绕组时,会产生旋转电磁场。旋转电磁场在转子绕组中产生感应电流。转子中的感应电流会产生一个阻碍定子磁场变化的磁场。这种阻碍作用产生的力使转子沿定子磁场的方向旋转。以同步速度旋转不会在转子中产生感应电流,因此感应电机的运转速度总是略慢于同步速度。转子的同步速度和运转速度之间的差异称为“转差” 或“转差角” ,典型的转差值在 2% 到 6% 之间。这就是 ACIM 异步运转的原理。改变输入电流的频率可以控制交流感应电机的转速, 例如采用变频驱动 (VFD)。
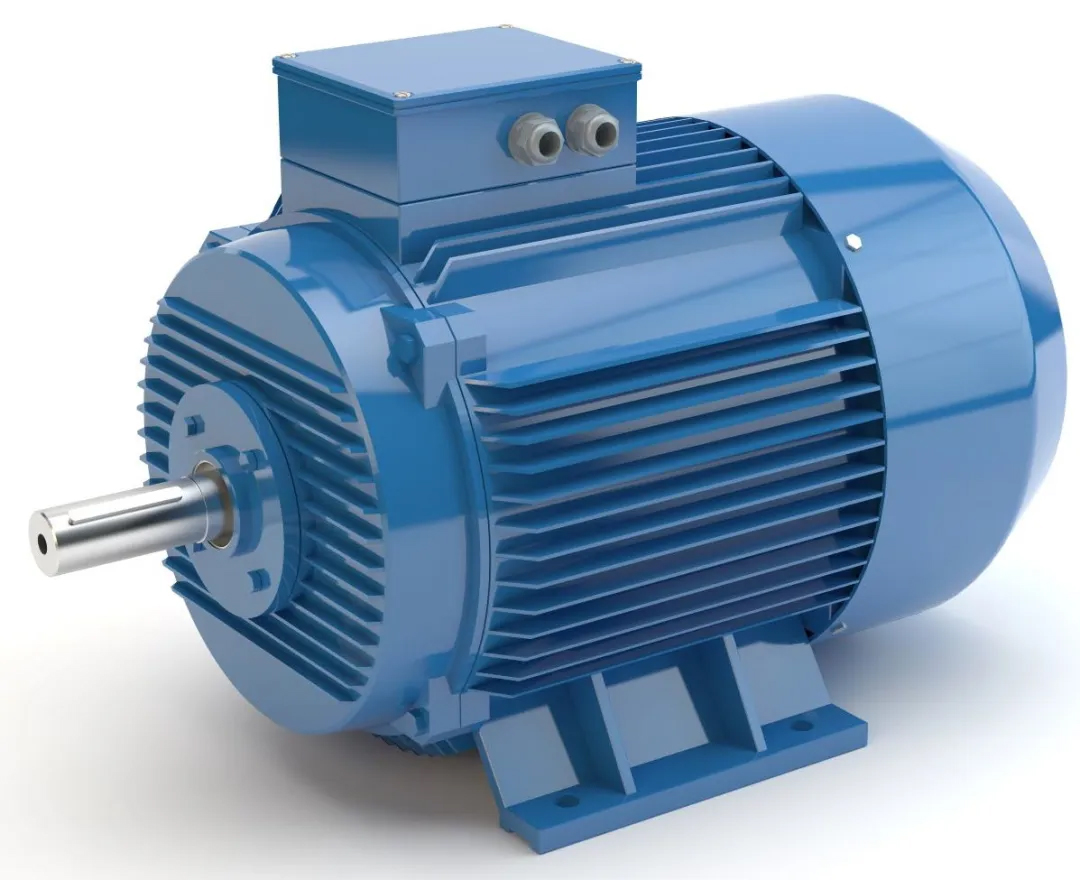
图 2:交流感应电机
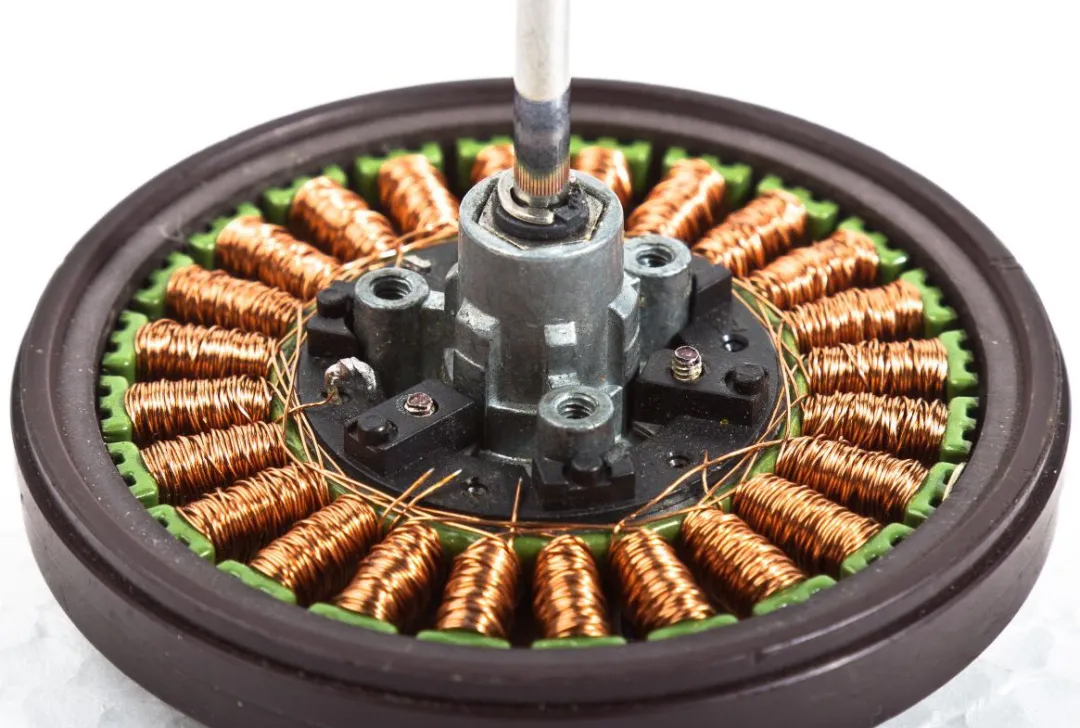
图 3:无刷直流电机
永磁同步电机 (PMSM) 和无刷直流 (BLDC) 电机所采用的定子与 ACIM 相同, 但转子中包含永磁体。这种设计不需要感应电流,因此能效更高 在这类电机中,转子速度等于定子电磁场的速度,也就是同步运行。PMSM 和 BLDC 的区别在于控制方式和反电动势 (BEMF) 响应。BLDC 的 BEMF 响应是梯形的, 而 PMSM 的响应是正弦的。
ACIM 和 PMSM/BLDC 非常适合连续运行且需要精确的速度和扭矩控制的场景, 通常用于传送带、物料搬运系统、 泵和压缩机等重型应用。因包含永磁体, 这些电机的成本较高。
表 1:交流感应电机与永磁同步/无刷直流电机对比
步进电机和伺服系统用于精确定位和受控运动场景,广泛用于驱动机械臂、 装配线、 升降辅助设备和其他需要保持和定位的类似应用。此类系统的特点是高准确性和良好的可重复性。
步进电机的转子通常包含永磁体和多个小齿,而齿数决定了步数。定子也有小齿, 但数量少于转子。就分布方式而言,有些与转子上的小齿对齐,有些则反之。定子线圈分为两组独立线圈。通电后, 线圈产生的磁场使齿部对齐, 从而使转子精确地转动一步。通过反复给两组线圈通电, 无需任何反馈即可实现非常精确的运动, 这种方式称为开环控制。
步进电机驱动器可以是单极的,也可以是双极的。双极步进电机的电流在两个方向上流动, 并且需要全桥逆变器来驱动两组绕组中的每一组。相比之下, 单极步进电机只需要电流单向流动,控制更加简单。此类电机可通过简单的高侧或低侧开关进行控制, 成本效益更佳。
伺服电机在闭环控制系统内运行。系统采用编码器的反馈来比较电机的实际位置与所需值。闭环可保障准确控制位置。伺服电机系统主要由三部分组成:电机、 反馈装置和控制电路。电机产生机械动力,可以是有刷直流电机、BLDC 电机、 PMSM 电机或 ACIM 电机。反馈装置提供有关电机位置、 扭矩和速度的信息。控制电路负责比较所需位置与实际位置,并调整输出以纠正存在的任何差异。

图 4:步进电机 - 注意定子和转子上的小齿
表 2:步进电机与伺服电机系统对比
电机控制技术
梯形控制算法又称六步控制法,是较简单的控制算法,通过让电流同时流过两相, 第三相悬空, 使得电机有六种离散状态。此方法可产生高扭矩, 但与其他更先进的算法相比, 噪声和振动较大。
在正弦控制中,施加于电机绕组的电流波形是正弦波形,这种方法可降低扭矩纹波。但需要精确同步和识别转子位置,因此实现起来更加复杂。
与正弦控制相比, 磁场定向控制 (FOC) 在高速下可提供更高能效, 在动态负载下的性能也比上述技术更优异。在整个换向过程中, FOC 让定子和转子保持九十度对齐来优化电机扭矩, 从而降低扭矩纹波, 让旋转过程更平稳、 更静音。
转子位置
检测转子位置常需使用霍尔效应传感器。当转子经过霍尔效应传感器时, 它会向控制器提供有关磁极位置的信息。霍尔效应传感器通常以 120 度间隔分布。
在无传感器应用中,可通过测量反电动势 (BEMF)确定转子位置和开关信号。图 5 对比了霍尔传感器与反电动势的情况。其他方法包括利用光学或电感传感器来获取有关转子位置的准确信息。
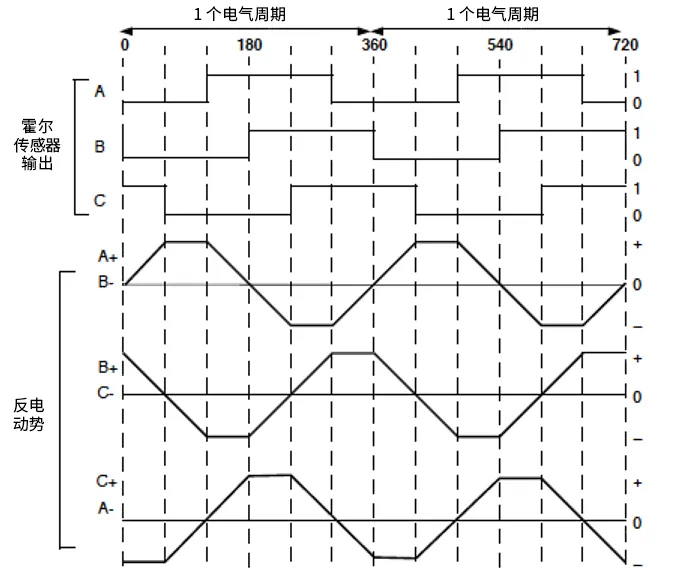
图 5:霍尔传感器输出与反电动势测量结果对比