深度感知三大核心技术,谁会成为下一个爆点?
近年来,3D 感知技术越来越多地应用于各行各业,尤其是工业自动化、机器人、自动驾驶、医疗保健、AR/VR 和安全领域。3D 感知是用于捕捉环境与物体三维形状并进行数字化处理的技术的统称,而深度感知在其中起着关键作用。
深度感知是实现 3D 测绘、物体识别、空间感知等高级认知功能的基础技术。对于需要精确实时处理环境与物体的形状、位置和运动的领域,这项技术不可或缺。通过深度感知技术,可以准确获取目标物体的位置信息,有助于实现自适应和智能化操作。
本文将主要介绍深度感知应用、深度感知的方法。
深度感知应用
工业自动化和机器人
随着智能工厂的发展,深度感知正被应用于生产线的自动化和质量检验。它能够捕捉传统二维视觉难以处理的三维形状,从而实现高精度定位和自适应控制。
协作机器人(取放)
为了准确识别和抓取随机放置的零件,垂直方向的距离检测至关重要。通过深度感知生成 3D 点云,并结合基于 AI 的物体识别算法,机器人就能适应环境的变化,实现精准拾取操作。
此外,确保人机协作的安全性也是一个关键问题。传统上,为了安全起见,机器人工作区域的周围会放置物理屏障;当有人靠近时,机器人必须停止工作,这会导致生产线暂停和生产效率降低。2D 摄像头可以检测到有物体进入工作区域,但是很难准确判断物体靠近的距离。如果能够获取实时深度信息,机器人就可以在不停止生产线的情况下控制运转速度。
自主移动机器人 (AMR) 和自动引导车辆 (AGV)
在工厂和仓库中,负责货物运输的仓库机器人 (AGV/AMR) 为了安全工作,需要识别周围环境并确定自己的位置。SLAM(同步定位与地图构建)技术可用于生成必要的 3D 地图、估算机器人的位置并避开障碍物。深度感知对于 SLAM 的定位起着至关重要的作用。此外,深度感知还用于人机协作时检测人员和动态避让,或是用于手势识别来实现控制目的。
测量包裹尺寸
使用深度传感器可以实时捕捉传送带上移动的物料和包裹的形状、体积与尺寸,从而有望实现产品识别和根据配送目的地分拣等流程的自动化。
检验和质量控制
在产品外观检查环节,利用深度感知技术可以高精度地检测出细微的形状瑕疵。它能够检测高度方向上的异常(例如表面不规则或扭曲),而传统的二维图像处理很难做到这一点。
门禁控制
在门禁控制(出入口管理)和监控系统中应用深度感知技术,可以显著增强传统的安全技术。深度感知在生物识别认证和非法入侵侦测等领域发挥着至关重要的作用。
3D 人脸识别(生物识别验证)
与传统的 2D 人脸识别相比,采用深度感知技术的 3D 人脸识别具有更高的安全性。通过利用深度传感器和基于深度学习的人脸识别算法,可以实现以下先进的身份验证功能:
• 防止深度伪造和照片伪造(利用 3D 深度信息实现反诈骗)
• 提高弱光和夜间环境下的识别准确度(NIR 深度传感器)
• 大型设施中的实时身份验证和监控(同时识别多人)
非法入侵检测
将监控摄像头与深度感知技术相结合,可以实现更准确的非法入侵检测。3D 边界监控和人员追踪系统在增加了距离信息后,能够识别传统 2D 监控摄像头难以检测到的情况,从而降低误检的可能性。
自动驾驶、ADAS(先进驾驶辅助系统)、DMS、OMS
自动驾驶汽车利用激光雷达和立体摄像头实现深度感知,从而识别周围环境。此技术使得汽车能够实时了解周围的空间情况,有助于汽车检测障碍物和规划行驶路径。 此外,深度感知越来越多地用于座舱应用,例如驾驶员监控系统 (DMS) 和乘客监控系统 (OMS)。
AR/VR 和娱乐
VR 头戴设备和 AR 设备利用深度感知技术识别用户周围环境,让用户实现与虚拟物体的交互。最近,飞行时间 (ToF) 传感器的引入大幅提升了空间测绘的精度。运动捕捉技术利用深度信息可以实现流畅的运动分析,不再需要使用传统的标记点。
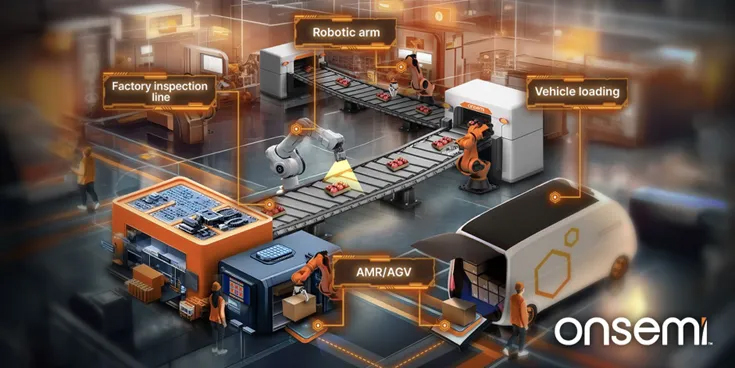
图 1. 深度感知在仓库中的应用
医疗保健
手术辅助机器人利用深度感知技术进行实时 3D 成像,提升内窥镜手术的精准度。结合 ToF 摄像头和立体视觉,手术机器人可以测量器官组织的深度,从而提高手术的安全性。此外,在康复治疗中,可以利用深度摄像头分析患者的运动情况;当结合机器学习时,可以制定优化的康复方案。
深度感知的主要方法
立体视觉
立体视觉是一种利用左右两个摄像头拍摄的图像的视差来识别三维物体的技术。通过分析两幅图像的视差来获取深度信息,再利用三角测量原理确定物体的距离。由于它仅依赖光线接收,因此目标物体的反射率一般不会影响测量结果。
然而,测量精度会受到摄像头之间的距离(基线)、镜头的焦距和图像传感器的像素数量的影响。因此,摄像头尺寸与精度之间存在反比关系。此外,在夜间或弱光条件下,测量精度通常会降低。为获取深度信息所需的计算量相对较大。
结构光
结构光方法涉及投射特定的光图案,并分析反射光图案的失真度,以此获取深度信息。通过使用高分辨率投影仪和高灵敏度 / 高分辨率 CMOS 传感器,从多个角度捕捉图像,可以构建高精度的 3D 扫描仪。该方法广泛应用于机器视觉等测量应用。
获取深度信息所需的计算量相对较大。此外,如果物体在测量过程中移动,则无法获得准确信息,因此该方法通常不适合动态移动目标。
飞行时间 (ToF)
飞行时间法利用光线往返时间来测量深度(距离)。ToF 方法主要分为两类:直接飞行时间 (dToF) 和间接飞行时间 (iToF)。
•
直接飞行时间 (dToF):直接飞行时间 (dToF) 是一种直接测量光脉冲发射后从物体反射回来所需时间的方法。通过精确测量从激光脉冲发射到反射光接收的时间,可以计算出目标的距离。该方法适合于需要长距离测量和高精度的场合,广泛应用于自动驾驶和机器人领域,例如光检测和测距 (LiDAR)。然而,它测量的是光脉冲的飞行时间,所以本质上测量的是点 (1D)。为了实现 2D 或 3D 成像,必须扫描光源,或者采用多个光源和光电探测器组成的阵列。因此,用这种方法实现高分辨率通常很困难。
•
间接飞行时间 (iToF):间接飞行时间 (iToF) 是一种通过发射调制连续光并测量反射光的相移来计算距离的方法。该技术涉及以恒定频率调制照射光,并分析反射光的相移,从而获取深度信息。iToF 支持同时获取整个画面中每个像素的距离信息,这使得实时距离测量(即录制包含距离信息的视频)和高分辨率成像成为可能。但是,它容易受到环境光干扰,并且测量范围相对较短。此外,深度计算需要多次曝光,这在目标快速移动时可能会导致图像模糊。
与其他方法相比,利用飞行时间 (ToF) 法获取深度信息所需的计算量较小。直接飞行时间 (dToF) 技术广泛用于 LiDAR 等众多应用。然而,它在提高 3D 分辨率方面存在结构性挑战,而且成本高昂。 另一方面,间接飞行时间 (iToF) 技术虽然更容易实现高分辨率,但较易受到环境光干扰,导致应用范围受限。